 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng Việt¿Qué es el algoritmo de control PID?
En aplicaciones prácticas de ingeniería, el algoritmo de control PID es el algoritmo más utilizado. El siguiente pasaje es la introducción específica de lo que es el algoritmo de control PID.
¿Cuál es el principio de trabajo del algoritmo de control PID?
La ley de control del regulador más ampliamente utilizada de control proporcional, integral y diferencial se conoce como algoritmo de control PID, también conocido como control PID o regulación PID. Los controladores PID tienen una historia de casi 70 años. La estructura simple, la buena estabilidad y el rendimiento confiable se han convertido en una de las principales tecnologías de control industrial. Cuando la estructura y los parámetros del objeto controlado no se dan por completo, la estructura y los parámetros del controlador del sistema deben basarse en la experiencia y la puesta en servicio en el sitio, y la aplicación de la tecnología de control PID es la tecnología más conveniente. Para el algoritmo de control PID, hay control PI y control PD. El controlador PID funciona calculando los valores de control proporcional, integral y diferencial.
Actualmente hay 3 tipos de algoritmos de control PID relativamente simples, a saber: algoritmo incremental, algoritmo de tipo de posición, algoritmo diferencial. Estos algoritmos de control son los algoritmos más simples y básicos que tienen sus propias características y cumplen con los requisitos generales de la mayoría de los controles.
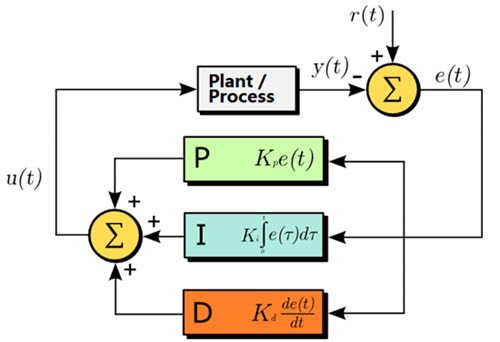
La fórmula completa es la siguiente:
u (t) = Kp * e (t) + KiSe (t) + Kd [e (t) - e (t-1)] + u0
En el proceso de depuración del algoritmo de control PID, debemos tener en cuenta los siguientes pasos:
1. Cerrar I y D, lo que significa establecerlos en 0 y aumentar P para producir oscilaciones;
2. Reducir P para encontrar el punto crítico de oscilación;
3. Aumentar I para alcanzar el valor objetivo;
4. Vuelva a encender para ver si el sobreimpulso, la oscilación y el tiempo de estabilización son consistentes con los requisitos;
5. Agregue apropiadamente algunos términos diferenciales para las condiciones de sobreimpulso y oscilación;
Métodos de ajuste de parámetros del controlador PID
El ajuste de parámetros del controlador PID es el núcleo del diseño del sistema de control de motor vectorial. Y hay muchos métodos de ajuste de parámetros del controlador PID, y se pueden resumir dos categorías:
1. Ajuste de cálculo teórico. Determina los parámetros del controlador basándose en un modelo matemático y cálculos teóricos. Los datos calculados por este método no pueden ser utilizados directamente, y deben ser ajustados y modificados.
2. El método de ajuste de ingeniería, que se basa principalmente en la experiencia de ingeniería para realizar directamente en la prueba del sistema de control y el método es fácil de entender y se usa ampliamente en la práctica de la ingeniería. Para los métodos de ajuste de parámetros del controlador PID, existen el método de relación crítica, el método de curva de respuesta y el método de caída.
Los métodos tienen sus propias características en el sentido de que todos se prueban primero y luego habría una fórmula empírica de ingeniería para implementar el ajuste de los parámetros del controlador. Hoy en día, el sistema de control PID se usa ampliamente en la automatización de PLC y variadores de frecuencia, mientras que el método más utilizado es el método de relación crítica.
Si necesita obtener más información sobre qué es el sistema de control PID y su principio de funcionamiento, no dude en contactarnos y nuestro soporte técnico le responderá pronto.
 Dejar un mensaje
Dejar un mensaje