 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtSolución de SD700 en Robot de Soldadura de Seis Ejes
Introducción a la industria
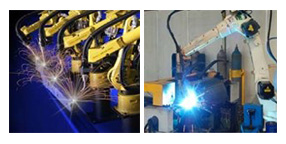
El robot de soldadura de seis ejes debe conectar pinzas de soldadura o pistolas de soldadura (corte) a la brida del eje final del robot industrial. Un mecanismo que permite soldar, cortar o pulverizar térmicamente. Se puede usar con seis servoaccionamientos para controlar, y la acción es muy flexible. Se puede soldar tridimensional e irregularmente en cualquier dirección. Es una máquina de operación de control automático reprogramable y multipropósito. Con tres o más ejes programables, tiene las características de estructura compacta, movimiento flexible y trabajo estable. Es ampliamente utilizado en el campo de la producción de soldadura automatizada.
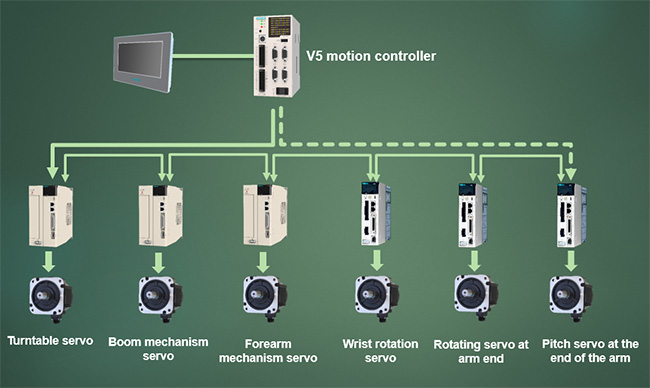
Topología del sistema
Puntos destacados del programa
1. La interfaz hombre-máquina se controla centralmente para realizar la configuración de parámetros de receta, el monitoreo de datos de producción, el conteo de salida y la operación es más inteligente y simple.
2. El controlador de operación de bus EtherCAT integra la solución maestra EtherCAT. Puede realizar movimiento coordinado multieje, movimiento puntual de alta velocidad y control de respuesta rápida en tiempo real. Haga que las partes móviles completen la acción de soldadura de acuerdo con la trayectoria de movimiento esperada y los parámetros de movimiento.
3. El servoaccionamiento tipo bus VEICHI SD700 EtherCAT tiene una frecuencia de respuesta ultraalta. El rango de velocidad es amplio, el rendimiento de sincronización es excelente, la capacidad antiinterferencias es fuerte y la estación maestra se adapta perfectamente.
Principio del proceso
El robot de soldadura de seis ejes se compone principalmente de un mecanismo de muñeca, un mecanismo de brazo y un mecanismo de giro:
1. Mecanismo de la muñeca: incluye la articulación de paso al final de la muñeca, la articulación giratoria al final de la muñeca y la articulación giratoria alrededor del eje de la muñeca en su conjunto. El motor en el extremo de la muñeca está ubicado en el extremo del brazo, y los dos servomotores transmiten la potencia de las dos primeras articulaciones de acción mediante un acoplamiento para conectar el mandril largo, y el engranaje cónico se utiliza para cambiar el dirección. Y usa la correa de distribución para transmitir la potencia hasta el final de la muñeca. Toda la articulación giratoria de la muñeca es impulsada por un servomotor para impulsar una rueda de correa síncrona para realizar el movimiento general alrededor del eje.
2. Mecanismo del brazo: incluye la articulación de inclinación del antebrazo alrededor del eje horizontal y la articulación de inclinación del brazo grande alrededor del eje horizontal. El servomotor transmite la junta de paso del antebrazo a las ruedas pequeñas del conjunto de engranajes a través de la correa de distribución, y luego la potencia finalmente se transmite al eje de la junta giratoria del antebrazo-pluma a través del engranaje recto cilíndrico involuto. El servomotor conjunto, la rueda de la correa de distribución y el juego de engranajes están dispuestos en la pluma. El servomotor de articulación de paso de brazo grande está ubicado en la base de la cintura. Una vez que la potencia sale del eje del motor, se transmite a un conjunto de engranajes rectos a través de una rueda de correa de distribución. Luego, el engranaje grande del conjunto de engranajes rectos se transfiere al eje de la junta de inclinación de la pluma.
3. Mecanismo giratorio: El peso de casi todo el equipo, como el mecanismo de muñeca y brazo, debe cargarse sobre el eje giratorio. Por lo tanto, la potencia del servomotor del mecanismo de giro se transmite directamente al eje de unión mediante un conjunto de engranajes helicoidales mediante la adición de un reductor.
Índice técnico
El radio de trabajo máximo puede alcanzar los 1400 mm.
La precisión de posicionamiento repetido puede alcanzar los 0,05 mm.
Solicitud









 Dejar un mensaje
Dejar un mensaje