 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng Việt





Sistema servo de alto rendimiento de la serie SD700
- Ancho de banda de respuesta de bucle de velocidad de hasta 3 KHz
- Adopte un codificador absoluto de 23 bits con una velocidad de comunicación de 2,5 Mpps
- El control robusto garantiza un funcionamiento suave, ampliamente utilizado en manipuladores
- Admite la función de control de vibración de múltiples etapas, limita efectivamente la resonancia
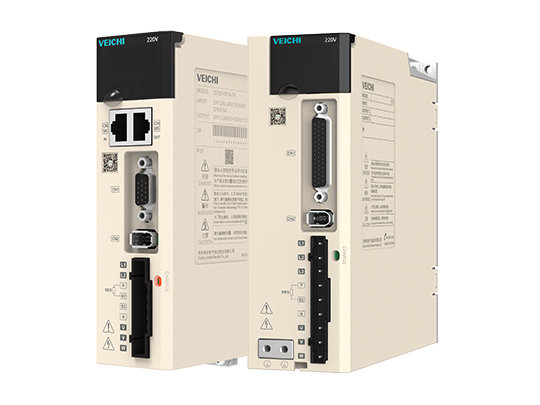
Descripción general del servosistema de alto rendimiento de la serie SD700
Los servoaccionamientos de la serie VEICHI SD700 son productos de alto rendimiento, alta confiabilidad, alta calidad y rentables para cumplir con una variedad de entornos industriales y aplicaciones de sistemas críticos y lograr la combinación perfecta de servo y programa.
Servo de uso general de alto rendimiento SD700: una fusión completa de sofisticación y simplicidad

1. El ancho de banda de respuesta del bucle de velocidad puede alcanzar los 3 kHz.
2. Con un codificador absoluto de 23 bits, la velocidad de comunicación puede alcanzar los 2,5 Mpps.
3. Configuración de ancho de banda, completa automáticamente el cálculo de ganancia de bucle PID.
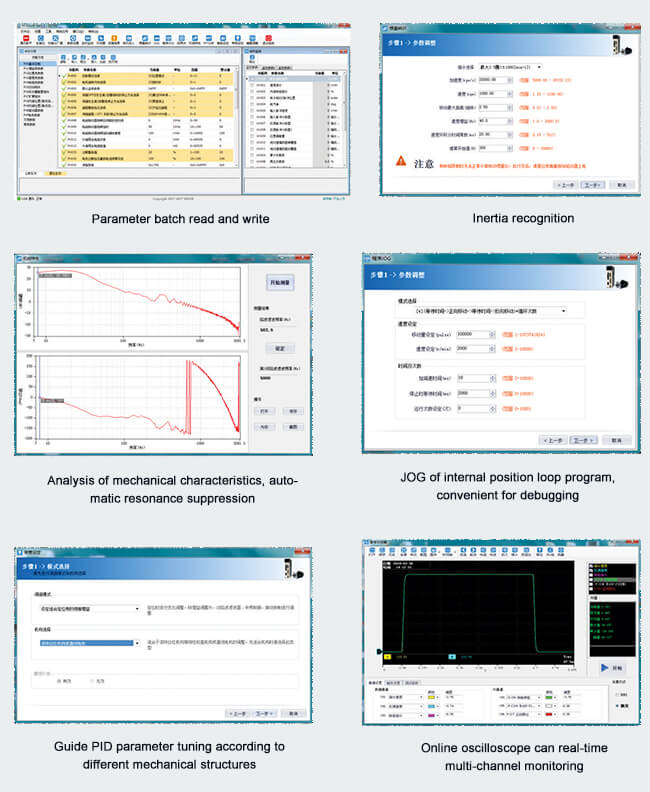
4. Potente software para PC, monitoreo multicanal, fácil de usar.
5. Complete automáticamente la identificación de inercia, la ganancia de bucle, la compensación de fricción y otros ajustes de parámetros.
6. Admite la función de control de vibración de múltiples etapas, limita efectivamente la resonancia.
7. El control robusto garantiza un funcionamiento suave de las cargas con inercia dentro de 30 veces.
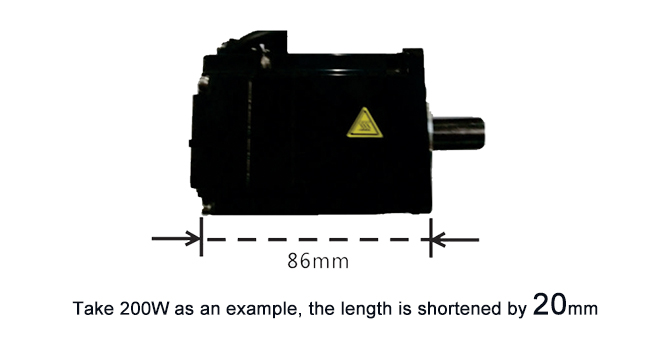
8. Nuevo diseño de apariencia estructural, compacto y que ahorra espacio.
Ancho de banda de respuesta de bucle de velocidad de 3 kHz
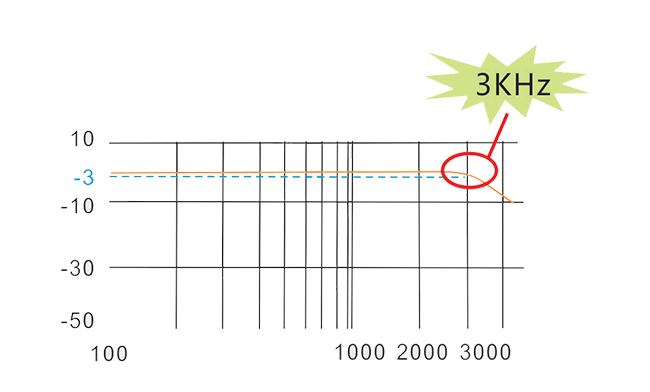
A través del algoritmo de bucle de corriente único, el ancho de banda del bucle de velocidad aumenta de manera efectiva y el tiempo de fraguado se acorta considerablemente. El tiempo de fraguado más rápido puede alcanzar 1 ms, lo que mejora la eficiencia de producción.
Codificador absoluto de 23 bits
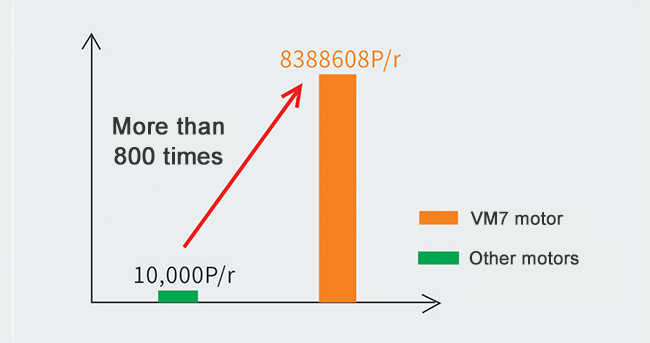
1. Codificador absoluto multivuelta estándar de 23 bits, una sola vuelta hasta 8388608 pulsos, velocidad de comunicación de hasta 2,5 Mpps.
2. El posicionamiento es más preciso, la baja velocidad es más estable y la posición de apagado no se pierde.
Control robusto
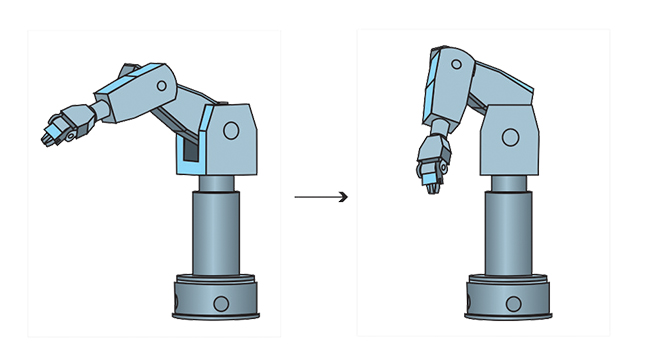
1. Se adopta el nuevo algoritmo de teoría de control para darse cuenta de que incluso si el momento de inercia de la carga cambia dentro de 30 veces durante el movimiento, no es necesario configurar los parámetros del esclavo para garantizar un funcionamiento sin problemas.
2. Se puede utilizar después de la instalación. Esta función es muy utilizada en manipuladores.
Admite el modo de circuito cerrado completo
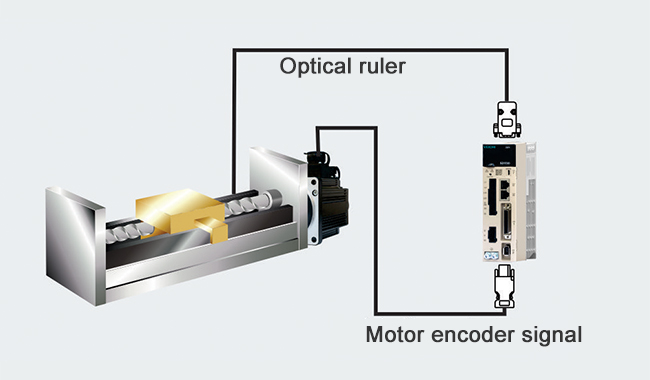
El modo de bucle completamente cerrado admite un segundo codificador externo o una regla de rejilla, lo que reduce los errores causados por la brecha de transmisión mecánica y mejora la precisión del posicionamiento. Todos los modelos están equipados con esta función.
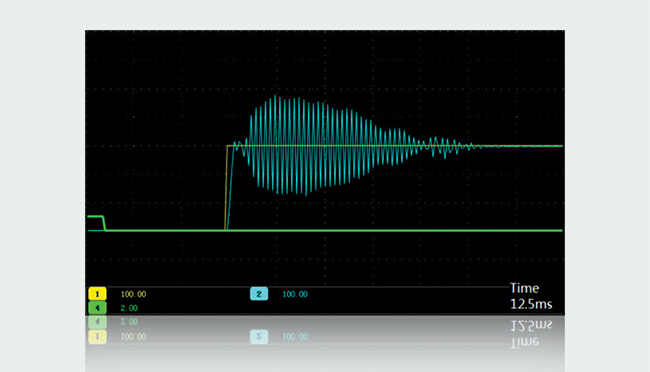
La función de control de vibraciones de baja frecuencia
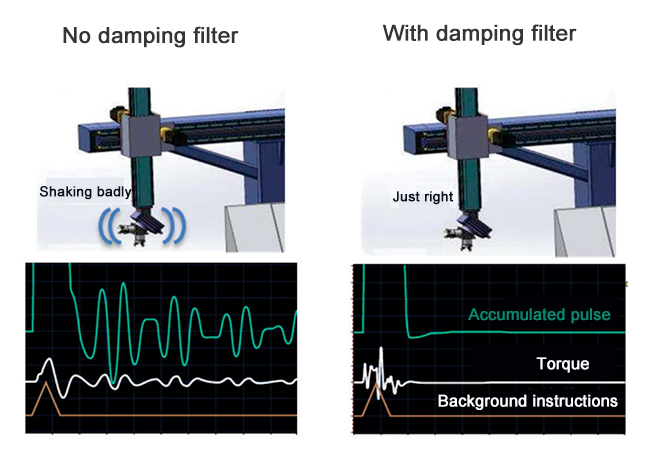
El filtro de amortiguación se puede configurar a través del software de la computadora host, que puede eliminar de manera efectiva la frecuencia de vibración inherente, reducir en gran medida la vibración (sacudida) del eje al detenerse y puede suprimir de manera efectiva la vibración de frecuencia de 0~100Hz. Esta función se usa comúnmente para eliminar los robots de moldeo por inyección y los apiladores. El extremo tiembla cuando se detiene.
Ajuste automático del filtro de muesca
1. No es necesario realizar mediciones y análisis de frecuencia de vibración complejos, y el filtro de muesca se puede buscar rápidamente y configurar automáticamente durante el proceso de ajuste de parámetros a través de la función de ajuste de parámetro único de la computadora host.
2. Simple y fácil de usar, el más rápido no supera los 70 ms. Puede reducir en gran medida el ruido y la vibración causados por la resonancia mecánica del equipo, para lograr una acción de respuesta más rápida. Esta función es muy utilizada en máquinas herramienta.
Configuración inteligente
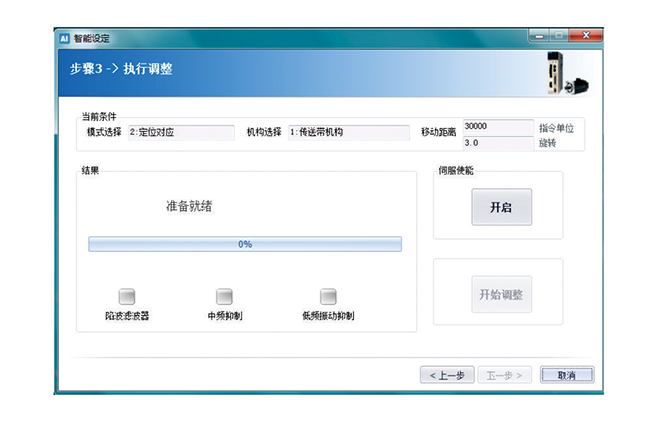
Ajuste automático de ganancia, modo de configuración guiada, la configuración secuencial puede completar la configuración de servoganancia, simple y fácil de usar. Proporciona más modos de ajuste, que se pueden ajustar de acuerdo con diferentes estructuras mecánicas y características del proceso, para que la máquina pueda alcanzar un estado adecuado.
Potente función de comunicación de bus

Admite RS-485, EtherCAT, CANopen, MECHA-METROLINK, MECHATROLINK y otros buses principales.
Reduce en gran medida el par pulsante del motor y la operación a baja velocidad es más estable.
Adopta un rotor de 10 etapas y un diseño de husillo de 12 ranuras. A través de un diseño de circuito magnético especial, el efecto de cogging se suprime de manera efectiva y la ondulación del par se reduce en gran medida, lo que garantiza que el motor funcione más suavemente a una velocidad constante y baja.
Potente software para PC
1. No es necesario instalar ni depurar software.
2. Comunicación USB entre la unidad y la computadora, fácil de usar.
Video del sistema servo de alto rendimiento de la serie SD700
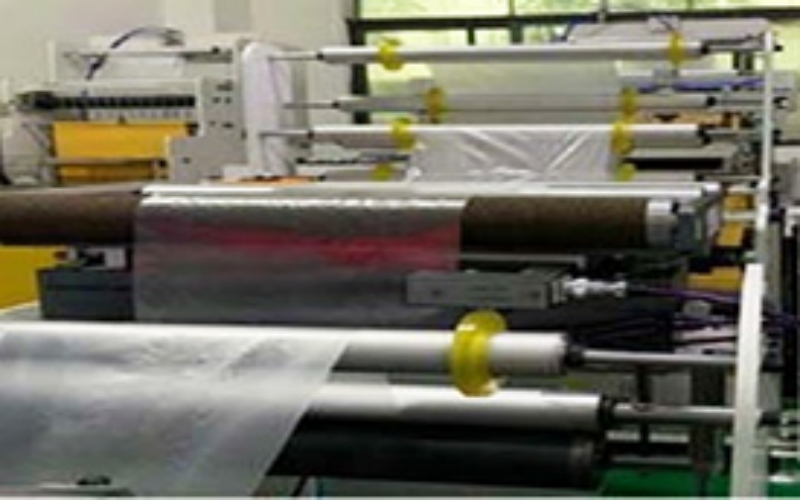
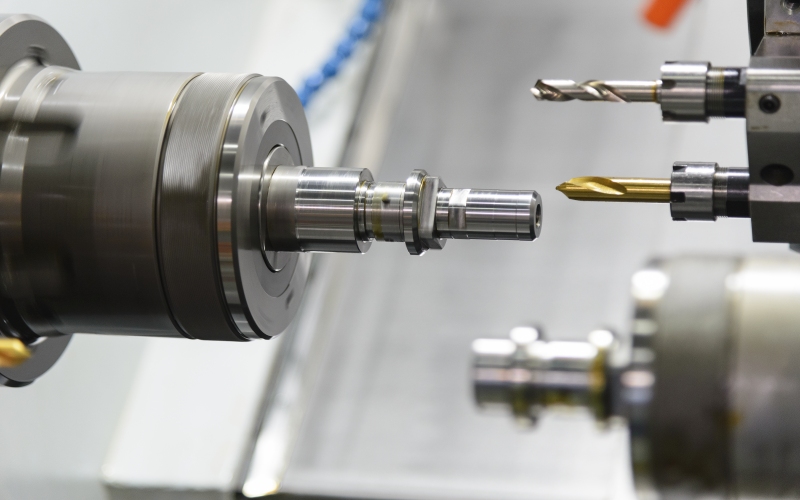
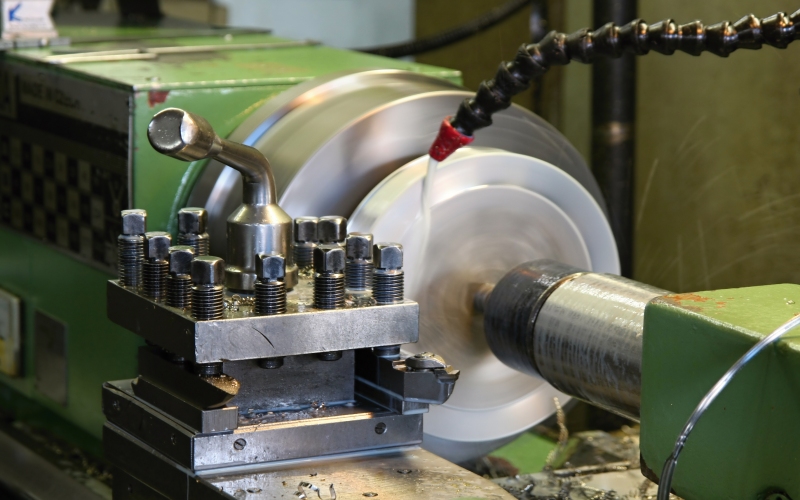
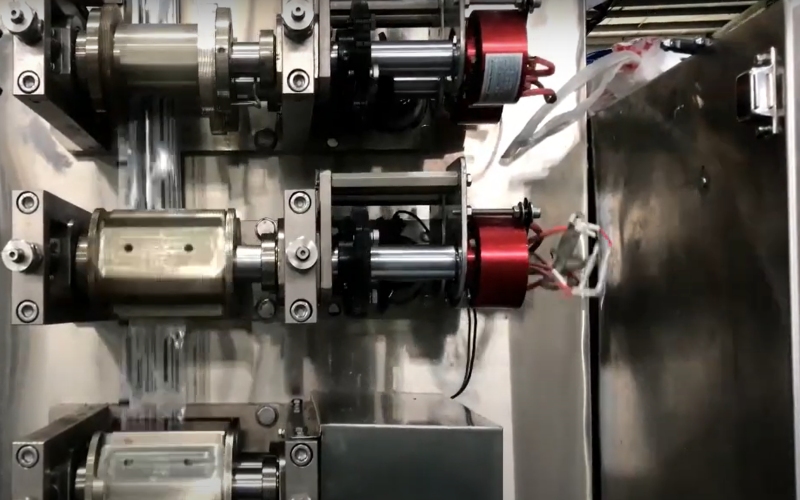
Aplicaciones industriales para el servosistema de alto rendimiento de la serie SD700
Aplicaciones: Equipos de fabricación electrónica, equipos de control numérico, maquinaria de embalaje, maquinaria de impresión, maquinaria textil, maquinaria de plástico y equipos de vidrio, equipos de prueba, etc.
Especificaciones
| Rango de poder | 0,1kW - 55kW, personalizado hasta 250kW |
|---|
| Modo de control | IGBT, control PWM y modo de manejo de corriente de onda sinusoidal |
|---|
| combinación de motor rotativo | Codificadores de comunicación serie: 17 bits, 20 bits y 24 bits (codificador absoluto) Codificador de pulso: codificador lineal provincial-2500 líneas Codificador tipo transformador rotativo |
|---|
| Temperatura ambiental | Temperatura ambiente: -5 ℃-55 ℃ (reduzca el uso de clasificaciones cuando es 55 ℃-60 ℃) |
|---|---|
| Temperatura de almacenamiento | -20℃~85℃ |
| Humedad del entorno operativo | menos 95% HR (sin congelar ni glasear) |
| Humedad de almacenamiento | menos 95% HR (sin congelar ni glasear) |
| resistencia de vibracion | 4.9m/s² |
| Resistencia al impacto | 19.6m/s² |
| Nivel de protección | IP20 |
| Limpieza | Sin gas corrosivo e inflamable Sin salpicaduras de agua, aceite y farmacia. Se utiliza en entornos con menos polvo, sal y polvo metálico |
| Altitud | menos 1000m (puedes reducir el uso de clasificaciones cuando es 1000-2000m) |
| Otros | Sin interferencias de electricidad estática, fuerte campo eléctrico, fuerte ruido magnético, radiación, etc. |
| Estándar aplicable | EN 61800-5-1:2007 EN 61800-3:2004/A1:2012 |
|---|
| Tipo de instalación | Tipo de montaje base: todos los modelos Tipo de montaje en estante: todos los modelos |
|---|
| Rango de control de velocidad | 1:6000 (el límite inferior del rango de control de velocidad es el valor en condiciones continuas con la carga de par nominal) |
|---|---|
| Tasa de fluctuación de velocidad | Fluctuación de carga: menos de ±0,01 % de la velocidad nominal (fluctuación de carga: 0 %-100 %) Fluctuación de voltaje: 0 % de la velocidad nominal (± 10 % del voltaje nominal) Fluctuación de temperatura: por debajo de ±0,1 % de la velocidad nominal (fluctuación de temperatura: 25±25 °C) |
| Precisión del control de par | ±1% |
| Configuración del tiempo de arranque suave | 0~10 s (la aceleración y la desaceleración se pueden configurar por separado) |
|---|
| RS-485 | Comunicación 1:N: cuando se utiliza el puerto RS-485, N máx. = 127 estaciones Configuración de la posición del eje: a través de la configuración de parámetros |
|---|---|
| comunicación USB | Equipo conectado: Computadora Protocolo: según la especificación USB1.1 (12M) |
| Función de visualización | Indicador de carga |
|---|
| Función de operación del panel | Interruptor de botón × 4 |
|---|
| Salida de pulso del divisor del codificador | Fase A, fase B y fase C: el número de pulso de frecuencia de transmisión de accionamiento lineal puede configurarse libremente |
|---|---|
| Señal de entrada de secuencia | Entrada fija: rango de tensión de funcionamiento: CC 5 V ± 5 % Entrada fija: Puntos de entrada: 1 punto Entrada fija: señal de entrada de solicitud de datos absolutos (SEN) del codificador |
| Señal de entrada de secuencia | Señal de entrada asignable: Rango de tensión de funcionamiento: DC24V±20% Señal de entrada asignable: Puntos de entrada: 9 puntos Señal de entrada asignable: Método de entrada: entrada de colector común y entrada de emisor común Señal de entrada asignable: Señal de entrada Señal de entrada asignable: Servo ON (/S-ON) Señal de entrada asignable: operación P/P-CON Señal de entrada asignable: Señal de interruptor de desaceleración de reinicio de inicio (/DEC) Señal de entrada asignable: Prohibición de marcha adelante (P-OT) y prohibición de marcha atrás (N-OT) Señal de entrada asignable: reinicio de alarma (/ALM-RST) Señal de entrada asignable: límite de par externo directo (/P-CL) y límite de par externo inverso (/N-CL) Señal de entrada asignable: Señal de selección de dirección de rotación de velocidad (/SPD-D) Señal de entrada asignable: interruptor de modo de control (/C-SEL) Señal de entrada asignable: Fijación de posición cero (/ZCLAMP) Señal de entrada asignable: Inhabilitar pulso de comando (/INHIBIT) Señal de entrada asignable: señal de entrada de detección de polos magnéticos (/P-DET) Señal de entrada asignable: conmutación de ganancia (/G-SEL) Señal de entrada asignable: interruptor de anulación de entrada de pulso de comando (/PSEL) Señal de entrada asignable: señal de entrada SEN (/SEN) Señal de entrada asignable: Señales asignables y lógica positiva/negativa cambiable |
| Señal de salida secuencial | Salida fija: Rango de voltaje de funcionamiento: DC5V~30V Salida fija: Puntos de salida: 1 punto Salida fija: Señal de salida: alarma de servo (ALM) |
| Señal de salida secuencial | Señal de salida asignable: Rango de tensión de funcionamiento: DC5V~30V Señal de salida asignable: Puntos de salida: 3 puntos Señal de salida asignable: Método de entrada: salida de acoplador opcional (tipo aislado) Señal de salida asignable: Señal de salida Señal de salida asignable: Posicionamiento completado (/COIN) Señal de salida asignable: Comprobación rotativa (/TGON) Señal de salida asignable: Servo listo (/S-RDY) Señal de salida asignable: Detección de límite de par (/CLT) Señal de salida asignable: Control de límite de velocidad (/VLT) Señal de salida asignable: Frenos (/BK) Señal de salida asignable: Advertencia (/WARN) Señal de salida asignable: localizar cerca (/NEAR) Señal de salida asignable: Señales asignables y lógica positiva/negativa cambiable |
| Freno dinámico | Funcionamiento en el circuito principal apagado, alarma servo, servo apagado y sobrecarrera (OT) |
|---|
| Regenerador | función incorporada |
|---|
| Protección contra sobrecarrera (OT) | Parada de freno dinámico (DB), parada de desaceleración o parada de marcha libre durante la operación de entrada P-OT o N-OT |
|---|
| función protectora | Sobrecorriente, sobretensión, subtensión, sobrecarga, fallas regenerativas, etc. |
|---|
| Función de accesibilidad | Ajuste de ganancia, registros de alarma, operación JOG, búsqueda de origen, etc. |
|---|
| Aporte | STO: base de la señal de bloque del módulo de potencia |
|---|
| Control de posición | Compensación de alimentación hacia adelante: 0% ~ 100% |
|---|---|
| Control de posición | Organizar el alcance de la ubicación: 0 ~ 1073741824 unidad de instrucción |
| Control de posición | Señal de entrada: Pulso de comando: Forma de pulso de comando: Elija cualquiera de los siguientes Señal de entrada: Pulso de comando: Forma de pulso de comando: Símbolo y secuencia de pulsos, secuencia de pulsos CW+CCW, diferencia de fase de 90° y pulso bifásico Señal de entrada: Impulso de comando: Forma de entrada: Accionamiento lineal y colector abierto Señal de entrada: Impulso de comando: Frecuencia de entrada máxima: Controlador de línea Señal de entrada: Pulso de comando: Frecuencia máxima de entrada: Símbolo + secuencia de pulsos, CW + CCW secuencia de pulsos: 4Mpps Señal de entrada: Pulso de comando: Frecuencia máxima de entrada: 90° diferencia de fase Pulso bifásico: 1Mpps Señal de entrada: Impulso de comando: Frecuencia de entrada máxima: Colector abierto Señal de entrada: Pulso de comando: Frecuencia máxima de entrada: Símbolo + secuencia de pulsos, CW + CCW secuencia de pulsos: 200Kpps Señal de entrada: Pulso de comando: Frecuencia máxima de entrada: pulso bifásico de diferencia de fase de 90°: 200 Kpps Señal de entrada: Pulso de comando: Interruptor de anulación de entrada: 1~100 veces Señal de entrada: señal clara: compensación de desviación de posición |
| Control de velocidad | Configuración del tiempo de arranque suave: 0~10 s (la aceleración y la desaceleración se pueden configurar por separado) |
| Control de velocidad | señal de entrada: Voltaje de comando: Voltaje de entrada máximo: ±10 V (rotación hacia adelante del motor cuando se ordena voltaje positivo) señal de entrada: Voltaje de comando: Velocidad nominal en DC6V [configuración de fábrica] señal de entrada: Voltaje de comando: Configuración de ganancia de entrada modificable señal de entrada: Resistencia de entrada: Aproximadamente 14KΩ señal de entrada: parámetro de tiempo de bucle: 30 μs |
| Speed control | Control de velocidad configurado internamente: Selección de la dirección de rotación: Use la señal de operación P Control de velocidad configurado internamente: Selección de velocidad: Uso de entrada de señal de límite de par externo de avance/retroceso Control de velocidad configurado internamente: Selección de velocidad: Detener o cambiar a otro modo de control cuando ambos lados están APAGADOS |
| control de par | Señal de entrada: Voltaje de comando: Voltaje de entrada máximo: ±10 V (rotación positiva del motor cuando se ordena voltaje positivo) Señal de entrada: Voltaje de comando: Velocidad nominal a DC6V [configuración de fábrica] Señal de entrada: Voltaje de comando: Configuración de ganancia de entrada modificable |
| control de par | Señal de entrada: Resistencia de entrada: Aproximadamente 14KΩ Señal de entrada: parámetro de tiempo de bucle: 16 μs |
Descargas
| Nombre del archivo | Tipo | Idioma | Tipo de archivo | Actualizar | Descargar |
|---|---|---|---|---|---|
| CE (EMC) of SD700 Servo Drive | Certificate | English | 2018-07-06 | 283KB | |
| Upper Computer Debugging Software V1.6.10 | Software | English | ZIP | 2022-01-27 | 18.6MB |
| SD700 Series Servo Technical Manual V1.1 | Manual | English | 2022-04-21 | 9.04MB | |
| CE (LVD) of SD700 Servo Drive | Certificate | English | 2018-07-06 | 283KB | |
| Servo Selection Software v1.3 | Software | English | ZIP | 2020-07-20 | 587KB |
| SD700 Servo Drive Catalog V1.1 | Catalog | English | 2022-04-07 | 14.7MB | |
| SD500 Spindle Servo Drive Instruction Manual V1.2-v1.3 | Manual | English | 2020-09-25 | 1.48MB | |
| Solution for Machine Tool Industry | Catalog | English | 2019-04-17 | 10MB | |
| SD700&710&780 Series Servo Soft V2.3-EN | Software | English | ZIP | 2022-11-29 | 50MB |
| SD700 Servo Drive Manual V1.4 | Manual | English | 2020-10-20 | 4.99MB | |
| SD700 Series Servo Soft V1.6-Turkey | Software | Turkish | ZIP | 2019-09-20 | 90MB |
| SD700 Series Servo 3D Files | CAD File | English | ZIP | 2021-02-03 | 25.2MB |
| SD700 Servo Drive Catalog for Phone | Catalog | English | 2021-02-26 | 8.76MB | |
| SD700 Series Servo ECAT V1.1 G | Manual | English | ZIP | 2021-03-09 | 9.74KB |
| Servo Selection(A1.7) V1.2 | Software | English | ZIP | 2022-06-17 | 812MB |
| SD700 Profinet xml V1.0 | Manual | English | ZIP | 2022-04-20 | 12.3MB |
| SD700 Ethercat xml V1.0 | Manual | English | ZIP | 2022-05-17 | 3.88MB |























 Dejar un mensaje
Dejar un mensaje